Ubuntu 16.04 + ROS Kinetic 镜像分享与使用安装说明内容概要:1 网盘文件介绍 2 镜像制作 3 系统使用与安装
---- 祝ROS爱好者和开发者新年快乐:-) ----
镜像iso约1.7GB,更多功能在网盘中查找即可。
1 网盘文件介绍链接: https://pan.baidu.com/s/1hulIXwC 密码: 7udr
打开后,目前有5个文件夹,分别为pic、iso、code、build、book。
pic图片目录,iso镜像目录,code学习ROS一些代码压缩包,build制作镜像文件,book书籍分享。

在iso文件夹可以看到镜像文件ExbotBook_xxx.iso,由于之前发布镜像太大,目前这个镜像就是纯净版,只有Ubuntu 16.04,ROS Kinetic,Gazebo 7.5,MoveIt!以及学习的代码示例,稍后会在试用时做详细介绍。之后,会依据需求更新并增加镜像,定制版镜像制作也会在后续博客中介绍。下载完成后,在build文件夹下载Universal-USB-Installer用于制作启动盘。
2 镜像制作特别说明,试用时需要在BIOS设置Secure Boot为Disabled,安装完成后再开启Enable。
本镜像制作支持UEFI+Legacy启动,所以使用UEFI/Legacy Boot皆可。
制作过程如下:
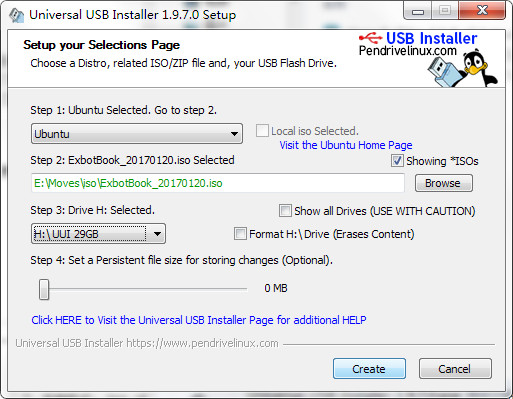
需要勾选Showing *ISOs,点击Create:
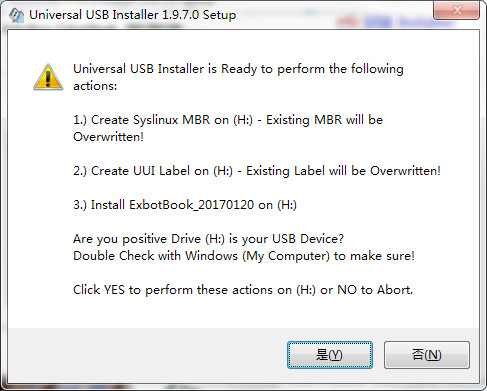
等待制作完成,约4-8分钟,休息一下:-)
好,镜像制作完成,重启电脑即可使用。下面内容均在U盘系统中完成。
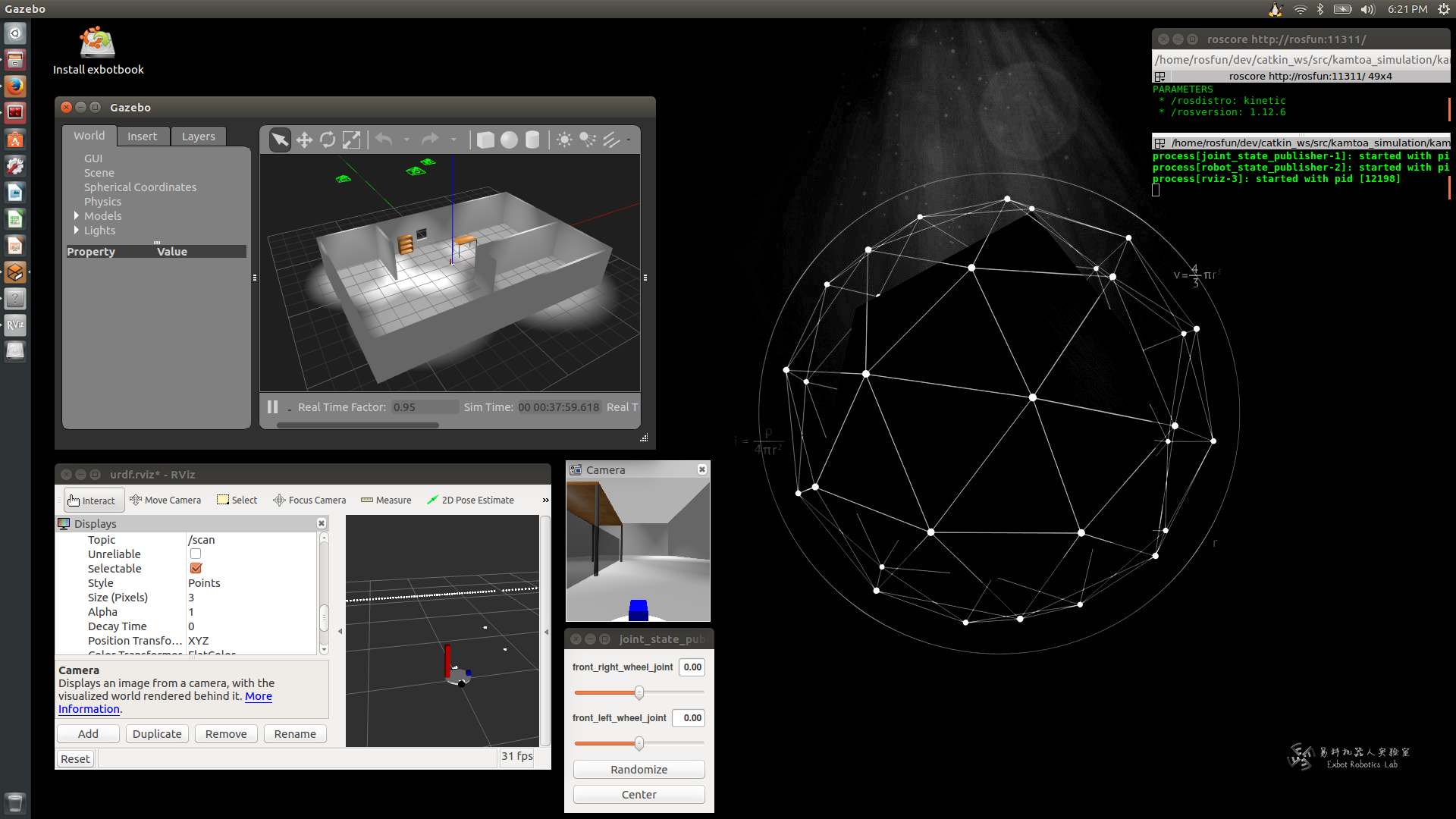
3 系统试用与安装选择试用exbotbook即可试用此系统。桌面如下:

系统用户名:rosfun 密码:exbot
已经编译好可以使用的功能包如下:
当然,也可以在终端再编译一下看看,当然这是U盘灯会快闪:-)
rosfun@rosfun:~$ cd dev/catkin_ws/
rosfun@rosfun:~/dev/catkin_ws$ catkin_make
Base path: /home/rosfun/dev/catkin_ws
Source space: /home/rosfun/dev/catkin_ws/src
Build space: /home/rosfun/dev/catkin_ws/build
Devel space: /home/rosfun/dev/catkin_ws/devel
Install space: /home/rosfun/dev/catkin_ws/install
####
#### Running command: "make cmake_check_build_system" in "/home/rosfun/dev/catkin_ws/build"
####
####
#### Running command: "make -j4 -l4" in "/home/rosfun/dev/catkin_ws/build"
####
[ 1%] Built target laser
[ 1%] Built target base_controller
[ 1%] Built target odometry
[ 2%] Built target tf_listener
[ 2%] Built target std_msgs_generate_messages_cpp
[ 3%] Built target tf_broadcast
[ 3%] Built target std_msgs_generate_messages_nodejs
[ 3%] Built target std_msgs_generate_messages_lisp
[ 3%] Built target std_msgs_generate_messages_py
[ 3%] Built target std_msgs_generate_messages_eus
[ 3%] Built target actionlib_msgs_generate_messages_eus
[ 3%] Built target _kamtoa_smarthome_controller_generate_messages_check_deps_smarthome_action
[ 3%] Built target _kamtoa_smarthome_controller_generate_messages_check_deps_smarthome_response
[ 3%] Built target _my_sph_actions_generate_messages_check_deps_sphero_action_msgActionGoal
[ 3%] Built target _my_sph_actions_generate_messages_check_deps_sphero_action_msgFeedback
[ 3%] Built target nav_msgs_generate_messages_eus
[ 3%] Built target _my_sph_actions_generate_messages_check_deps_sphero_action_msgActionResult
[ 3%] Built target _my_sph_actions_generate_messages_check_deps_sphero_action_msgResult
[ 3%] Built target _my_sph_actions_generate_messages_check_deps_sphero_action_msgGoal
[ 3%] Built target _my_sph_actions_generate_messages_check_deps_sphero_action_msgActionFeedback
[ 3%] Built target actionlib_msgs_generate_messages_nodejs
[ 3%] Built target nav_msgs_generate_messages_nodejs
[ 3%] Built target actionlib_msgs_generate_messages_py
[ 3%] Built target nav_msgs_generate_messages_py
[ 3%] Built target actionlib_msgs_generate_messages_cpp
[ 3%] Built target _my_sph_actions_generate_messages_check_deps_sphero_action_msgAction
[ 3%] Built target nav_msgs_generate_messages_cpp
[ 3%] Built target actionlib_msgs_generate_messages_lisp
[ 3%] Built target nav_msgs_generate_messages_lisp
[ 4%] Generating dynamic reconfigure files from cfg/chapter2.cfg: /home/rosfun/dev/catkin_ws/devel/include/chapter2_tutorials/chapter2Config.h /home/rosfun/dev/catkin_ws/devel/lib/python2.7/dist-packages/chapter2_tutorials/cfg/chapter2Config.py
[ 4%] Built target _sphero_node_generate_messages_check_deps_SpheroCollision
[ 4%] Built target _chapter2_tutorials_generate_messages_check_deps_chapter2_srv1
[ 4%] Built target _chapter2_tutorials_generate_messages_check_deps_chapter2_msg1
[ 4%] Built target _driver_base_generate_messages_check_deps_ConfigValue
[ 4%] Built target _driver_base_generate_messages_check_deps_ConfigString
[ 4%] Built target _driver_base_generate_messages_check_deps_SensorLevels
[ 6%] Built target chapter5_tutorials_gencfg
[ 6%] Built target kamtoa_joystick
[ 7%] Built target velocity_profiler
Generating reconfiguration files for chapter2_ in chapter2_tutorials
Wrote header file in /home/rosfun/dev/catkin_ws/devel/include/chapter2_tutorials/chapter2_Config.h
[ 9%] Built target camera_timer
[ 9%] Built target camera
[ 10%] Built target camera_polling
[ 10%] Built target chapter2_tutorials_gencfg
[ 11%] Built target sendGoals
[ 11%] Built target _chapter3_tutorials_generate_messages_check_deps_SetSpeed
[ 12%] Built target example7
[ 13%] Built target example3
[ 13%] Built target example1
[ 14%] Built target example2
[ 14%] Built target chapter3_tutorials_generate_messages_py
[ 15%] Built target example10
[ 15%] Built target chapter3_tutorials_generate_messages_lisp
[ 15%] Built target example8
[ 16%] Built target chapter3_tutorials_generate_messages_nodejs
[ 17%] Built target chapter3_tutorials_generate_messages_eus
[ 18%] Built target chapter3_tutorials_gencfg
[ 19%] Built target example9
[ 19%] Built target c4_example7
[ 20%] Built target c4_example6
[ 21%] Built target c4_example8
[ 22%] Built target c4_example5_2
[ 22%] Built target c4_example3
[ 23%] Built target c4_example2
[ 24%] Built target c4_example4
[ 25%] Built target c4_example1
[ 26%] Built target pcl_downsampling
[ 27%] Built target pcl_filter
[ 28%] Built target pcl_partitioning
[ 30%] Built target pcl_create
[ 30%] Built target pcl_model_estimation
[ 30%] Built target pcl_read
[ 31%] Built target pcl_visualize
[ 32%] Built target pcl_planar_segmentation
[ 32%] Built target pcl_matching
[ 33%] Built target pcl_write
[ 34%] Built target gazebo_contact_sensor_plugin
[ 34%] Built target rosbook_arm_hardware_gazebo
[ 34%] Built target octomap_msgs_generate_messages_lisp
[ 34%] Built target tf2_msgs_generate_messages_nodejs
[ 34%] Built target tf_generate_messages_cpp
[ 36%] Built target moveit_simple_grasps
[ 36%] Built target moveit_simple_grasps_filter
[ 36%] Built target actionlib_generate_messages_eus
[ 36%] Built target tf_generate_messages_py
[ 36%] Built target roscpp_generate_messages_lisp
[ 36%] Built target tf_generate_messages_eus
[ 36%] Built target geometry_msgs_generate_messages_lisp
[ 36%] Built target roscpp_generate_messages_nodejs
[ 36%] Built target tf_generate_messages_lisp
[ 36%] Built target rosgraph_msgs_generate_messages_lisp
[ 36%] Built target rosgraph_msgs_generate_messages_py
[ 36%] Built target roscpp_generate_messages_eus
[ 36%] Built target roscpp_generate_messages_py
[ 36%] Built target geometry_msgs_generate_messages_cpp
[ 36%] Built target sensor_msgs_generate_messages_nodejs
[ 36%] Built target tf_generate_messages_nodejs
[ 36%] Built target rosgraph_msgs_generate_messages_cpp
[ 36%] Built target tf2_msgs_generate_messages_cpp
[ 36%] Built target roscpp_generate_messages_cpp
[ 36%] Built target geometry_msgs_generate_messages_eus
[ 36%] Built target rosgraph_msgs_generate_messages_nodejs
[ 36%] Built target rosgraph_msgs_generate_messages_eus
[ 36%] Built target geometry_msgs_generate_messages_nodejs
[ 36%] Built target geometry_msgs_generate_messages_py
[ 36%] Built target sensor_msgs_generate_messages_cpp
[ 36%] Built target sensor_msgs_generate_messages_lisp
[ 36%] Built target tf2_msgs_generate_messages_lisp
[ 36%] Built target actionlib_generate_messages_cpp
[ 36%] Built target sensor_msgs_generate_messages_py
[ 36%] Built target actionlib_generate_messages_nodejs
[ 36%] Built target sensor_msgs_generate_messages_eus
[ 36%] Built target actionlib_generate_messages_py
[ 36%] Built target tf2_msgs_generate_messages_py
[ 36%] Built target tf2_msgs_generate_messages_eus
[ 36%] Built target actionlib_generate_messages_lisp
[ 36%] Built target visualization_msgs_generate_messages_cpp
[ 36%] Built target visualization_msgs_generate_messages_py
[ 36%] Built target visualization_msgs_generate_messages_eus
[ 36%] Built target visualization_msgs_generate_messages_lisp
[ 36%] Built target visualization_msgs_generate_messages_nodejs
[ 36%] Built target trajectory_msgs_generate_messages_nodejs
[ 36%] Built target trajectory_msgs_generate_messages_eus
[ 36%] Built target trajectory_msgs_generate_messages_cpp
[ 36%] Built target trajectory_msgs_generate_messages_lisp
[ 36%] Built target trajectory_msgs_generate_messages_py
[ 36%] Built target moveit_ros_manipulation_gencfg
[ 36%] Built target moveit_msgs_generate_messages_lisp
[ 36%] Built target octomap_msgs_generate_messages_py
[ 36%] Built target moveit_msgs_generate_messages_py
[ 36%] Built target object_recognition_msgs_generate_messages_nodejs
[ 36%] Built target shape_msgs_generate_messages_lisp
[ 36%] Built target object_recognition_msgs_generate_messages_lisp
[ 36%] Built target octomap_msgs_generate_messages_nodejs
[ 36%] Built target shape_msgs_generate_messages_eus
[ 36%] Built target object_recognition_msgs_generate_messages_py
[ 36%] Built target shape_msgs_generate_messages_cpp
[ 36%] Built target graph_msgs_generate_messages_py
[ 36%] Built target moveit_ros_planning_gencfg
[ 36%] Built target octomap_msgs_generate_messages_eus
[ 36%] Built target object_recognition_msgs_generate_messages_cpp
[ 36%] Built target moveit_msgs_generate_messages_cpp
[ 36%] Built target graph_msgs_generate_messages_cpp
[ 36%] Built target object_recognition_msgs_generate_messages_eus
[ 36%] Built target shape_msgs_generate_messages_py
[ 36%] Built target moveit_msgs_generate_messages_eus
[ 36%] Built target moveit_msgs_generate_messages_nodejs
[ 36%] Built target shape_msgs_generate_messages_nodejs
[ 36%] Built target graph_msgs_generate_messages_lisp
[ 36%] Built target graph_msgs_generate_messages_nodejs
[ 36%] Built target octomap_msgs_generate_messages_cpp
[ 36%] Built target graph_msgs_generate_messages_eus
[ 36%] Built target _moveit_simple_grasps_generate_messages_check_deps_GenerateGraspsActionGoal
[ 36%] Built target _moveit_simple_grasps_generate_messages_check_deps_GenerateGraspsGoal
[ 36%] Built target _moveit_simple_grasps_generate_messages_check_deps_GenerateGraspsActionFeedback
[ 36%] Built target _moveit_simple_grasps_generate_messages_check_deps_GenerateGraspsFeedback
[ 36%] Built target _moveit_simple_grasps_generate_messages_check_deps_GenerateGraspsActionResult
[ 36%] Built target _moveit_simple_grasps_generate_messages_check_deps_GenerateGraspsResult
[ 36%] Built target _moveit_simple_grasps_generate_messages_check_deps_GenerateGraspsAction
[ 36%] Built target _moveit_simple_grasps_generate_messages_check_deps_GraspGeneratorOptions
[ 36%] Built target move_group_remove_object
[ 37%] Built target move_group_plan_group_state
[ 38%] Built target move_group_plan_single_target
[ 39%] Built target move_group_plan_random_target
[ 39%] Built target robot1_description_xacro_generated_to_devel_space_
[ 39%] Built target kamtoa_description_xacro_generated_to_devel_space_
[ 39%] Built target sphero_gazebo_xacro_generated_to_devel_space_
[ 40%] Built target move_group_add_object
[ 40%] Built target state_publisher_tutorials
[ 40%] Built target kamtoa_smarthome_controller_generate_messages_cpp
[ 41%] Built target kamtoa_smarthome_controller_generate_messages_nodejs
[ 42%] Built target kamtoa_smarthome_controller_generate_messages_py
[ 42%] Built target gazebo_sphero_controller
[ 43%] Built target kamtoa_smarthome_controller_generate_messages_lisp
[ 44%] Built target kamtoa_smarthome_controller_generate_messages_eus
[ 47%] Built target my_sph_actions_generate_messages_eus
[ 51%] Built target my_sph_actions_generate_messages_nodejs
[ 54%] Built target my_sph_actions_generate_messages_py
[ 57%] Built target my_sph_actions_generate_messages_cpp
[ 59%] Built target my_sph_actions_generate_messages_lisp
[ 59%] Built target sphero_node_generate_messages_eus
[ 60%] Built target sphero_node_generate_messages_py
[ 61%] Built target sphero_node_generate_messages_cpp
[ 62%] Built target sphero_node_generate_messages_lisp
Scanning dependencies of target chap2_example4
[ 62%] Built target sphero_node_generate_messages_nodejs
[ 62%] Built target chapter2_tutorials_generate_messages_cpp
[ 63%] Built target chapter2_tutorials_generate_messages_eus
[ 64%] Built target chapter2_tutorials_generate_messages_py
[ 64%] Building CXX object Learning_ROS_for_Robotics_Programming/chapter2_tutorials/CMakeFiles/chap2_example4.dir/src/example4.cpp.o
[ 65%] Built target chapter2_tutorials_generate_messages_lisp
[ 66%] Built target chapter2_tutorials_generate_messages_nodejs
[ 67%] Built target chap2_example1_b
[ 69%] Built target chap2_example1_a
[ 69%] Built target chap2_example3_b
[ 70%] Built target driver_base_generate_messages_eus
[ 73%] Built target driver_base_generate_messages_nodejs
[ 73%] Built target driver_base_generate_messages_py
[ 74%] Built target driver_base_generate_messages_lisp
[ 76%] Built target driver_base_generate_messages_cpp
[ 76%] Built target chapter3_tutorials_generate_messages_cpp
[ 77%] Built target camera_stereo
[ 77%] Built target example6
[ 78%] Built target moveit_simple_grasps_test
[ 81%] Built target moveit_simple_grasps_generate_messages_nodejs
[ 84%] Built target moveit_simple_grasps_generate_messages_lisp
[ 84%] Built target moveit_simple_grasps_server
[ 85%] Built target moveit_simple_grasps_filter_test
[ 89%] Built target moveit_simple_grasps_generate_messages_py
[ 92%] Built target moveit_simple_grasps_generate_messages_cpp
[ 95%] Built target moveit_simple_grasps_generate_messages_eus
[ 95%] Built target my_sph_actions_generate_messages
[ 95%] Built target kamtoa_smarthome_controller_generate_messages
[ 95%] Built target sphero_node_generate_messages
[ 96%] Built target chap2_example3_a
[ 97%] Built target chap2_example2_b
[ 98%] Built target gazebo_light_controller
[ 98%] Built target driver_base_generate_messages
[ 98%] Built target chap2_example2_a
[ 98%] Built target chapter2_tutorials_generate_messages
[ 98%] Built target chapter3_tutorials_generate_messages
[ 98%] Built target moveit_simple_grasps_generate_messages
[ 98%] Built target example4
[100%] Built target example5
[100%] Linking CXX executable /home/rosfun/dev/catkin_ws/devel/lib/chapter2_tutorials/chap2_example4
[100%] Built target chap2_example4
rosfun@rosfun:~/dev/catkin_ws$
举2个例子说明一下:
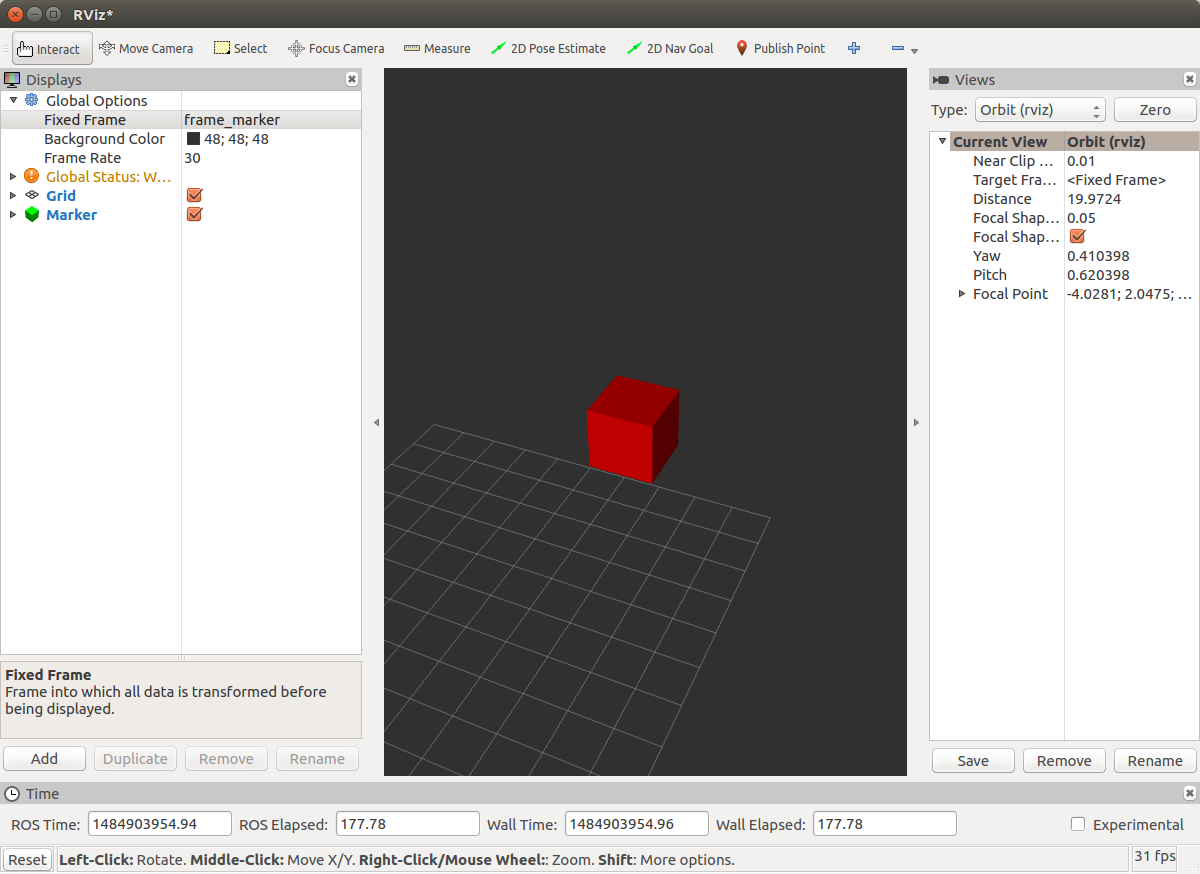
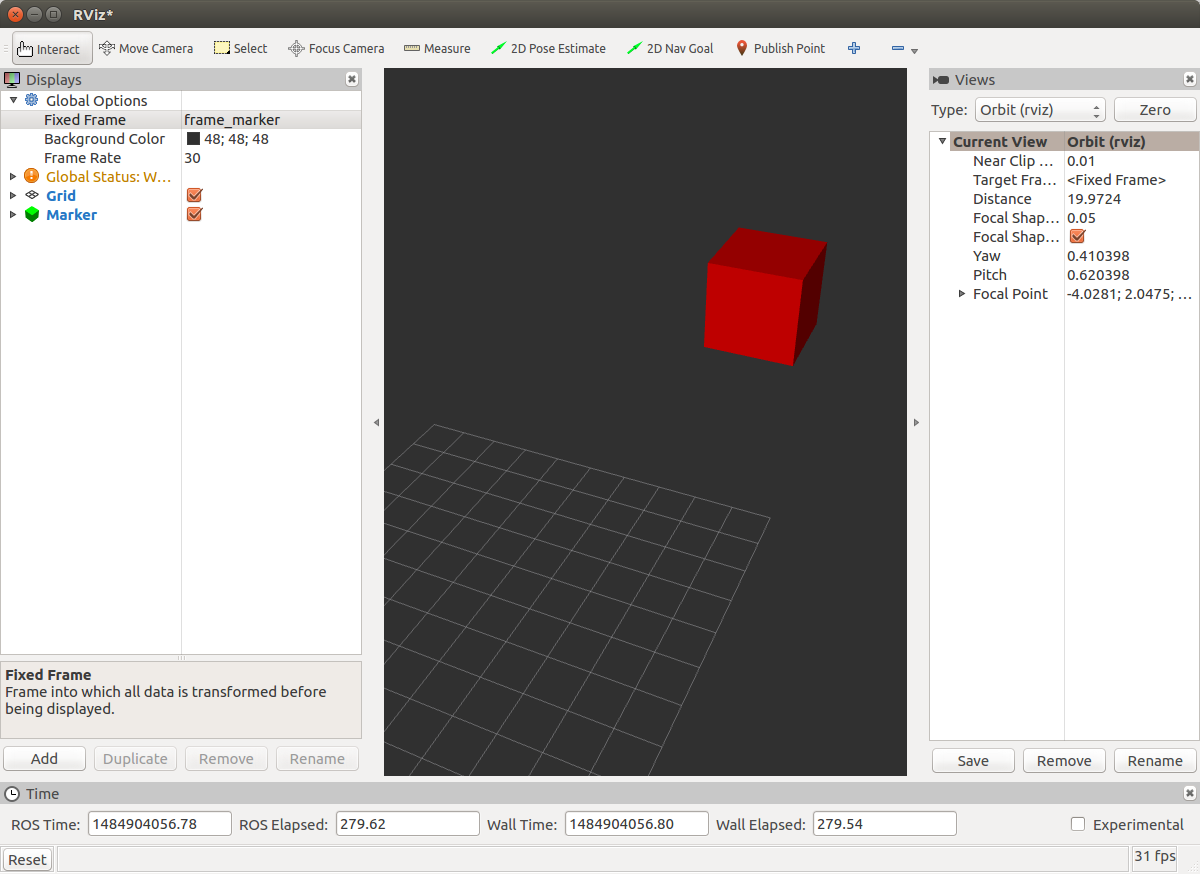
rviz:ROS数据可视化工具
$ roscore
$ rviz
$ roslaunch chapter3_tutorials example9.launch
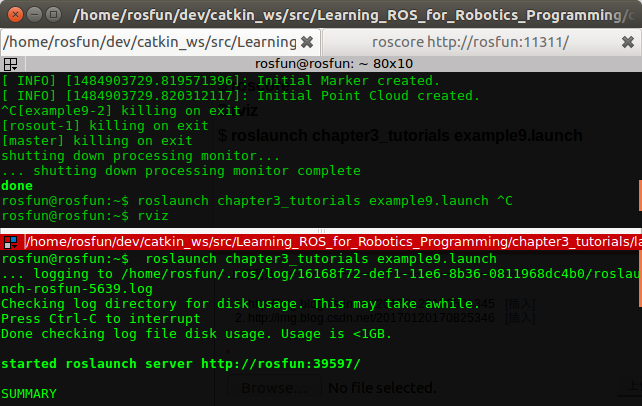
可以观察到红色方块在rviz中缓慢移动:
gazebo:(model已经完全下载好,ROS仿真利器)
$ roslaunch sphero_gazebo main.launch
$ roslaunch sphero_gazebo keyboard_teleop.launch
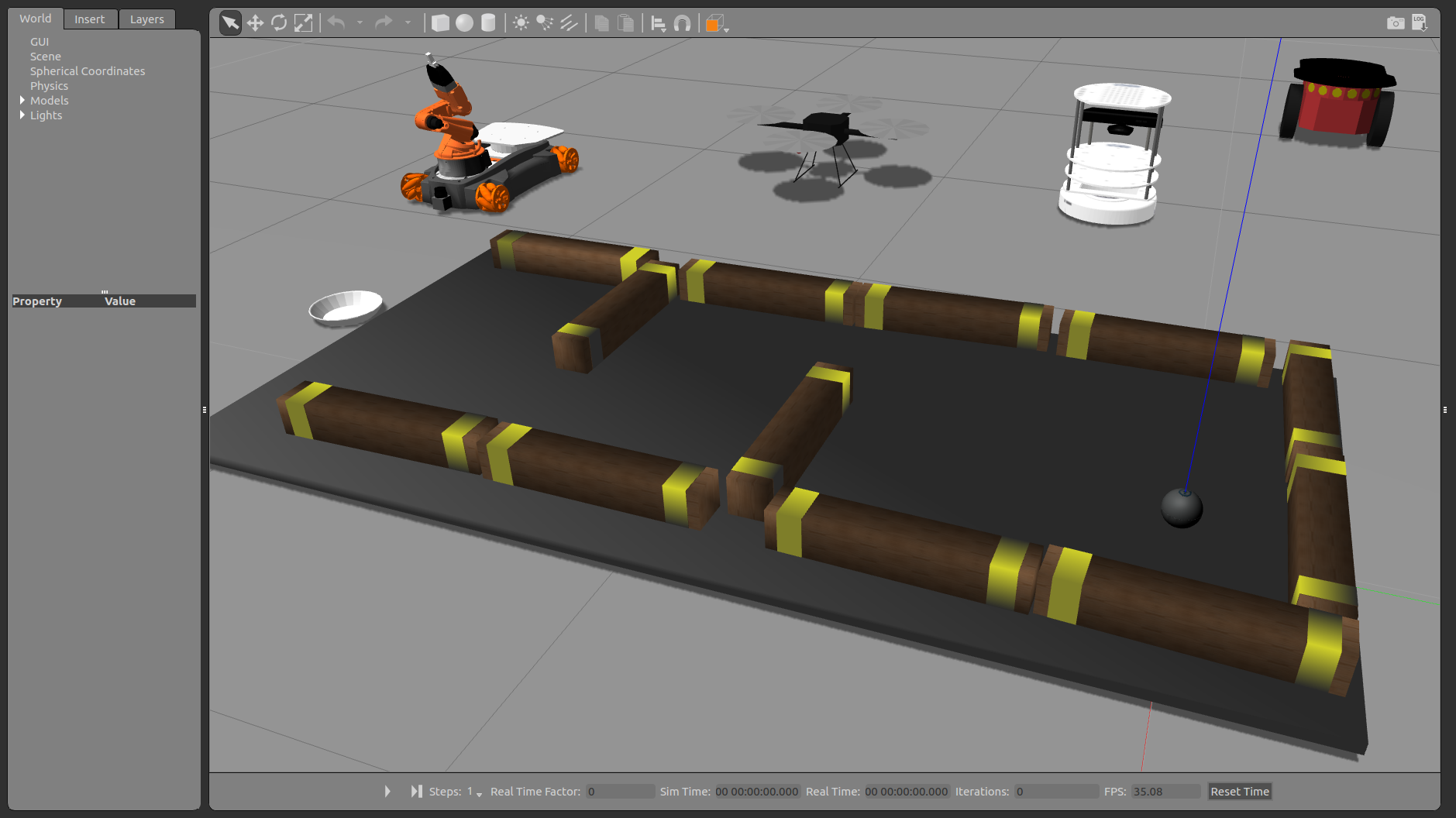
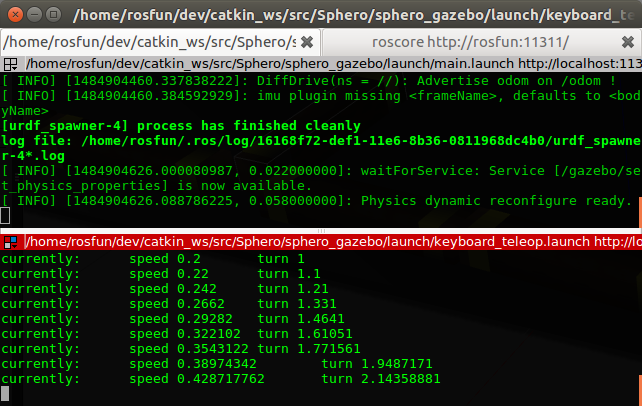
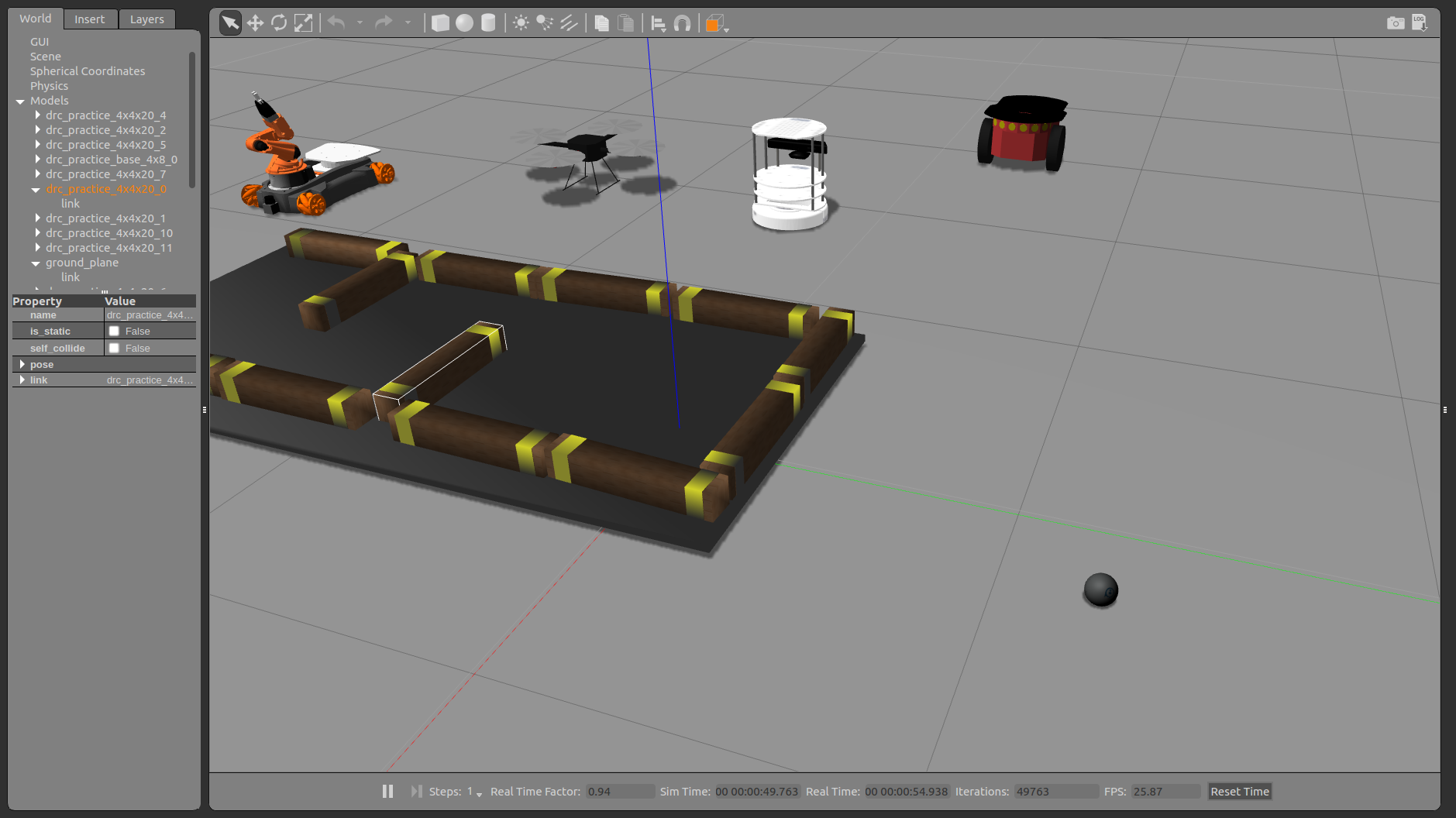
使用键盘控制小钢球在环境中移动,体验一下三维物理引擎仿真的效果(Gazebo 7.5)
当然书中的例子,以及github上代码有兴趣都可以尝试。
如果看到这里,想要安装后使用,请阅读如下文字:
如果对Linux不熟悉的话,冲动是魔鬼,先在U盘系统多多练习学习就好,否则万一安装失败windows没了怎么办,即使安装成功,无法进入windows怎么办,提示风险哦 ;-)
安装说明:
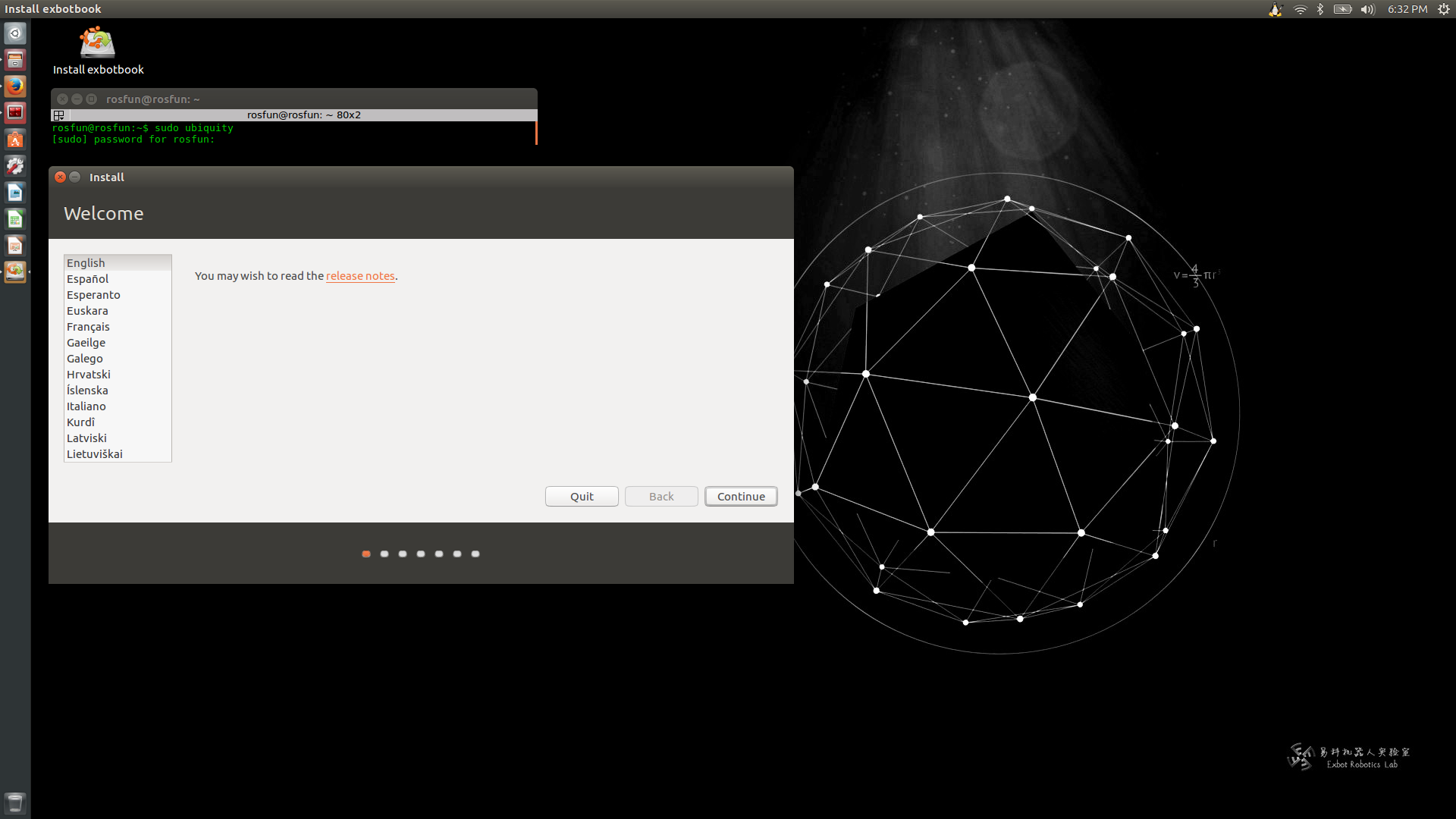
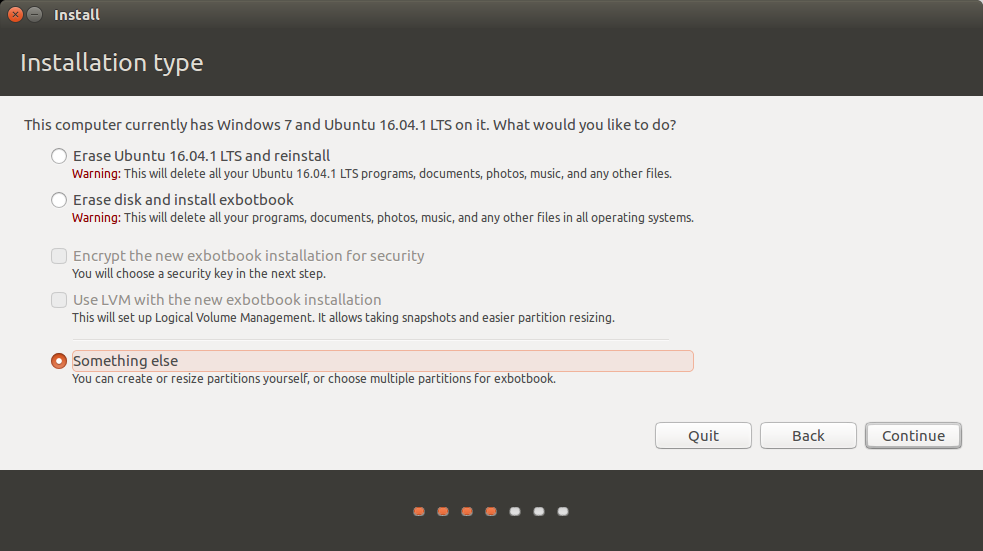
这时,如果你想安装,点击桌面右上角图标,是木有结果的:-)确定安装请往下看:
打开终端,输入$ sudo ubiquity 输入密码:exbot
熟悉的安装界面出现了:
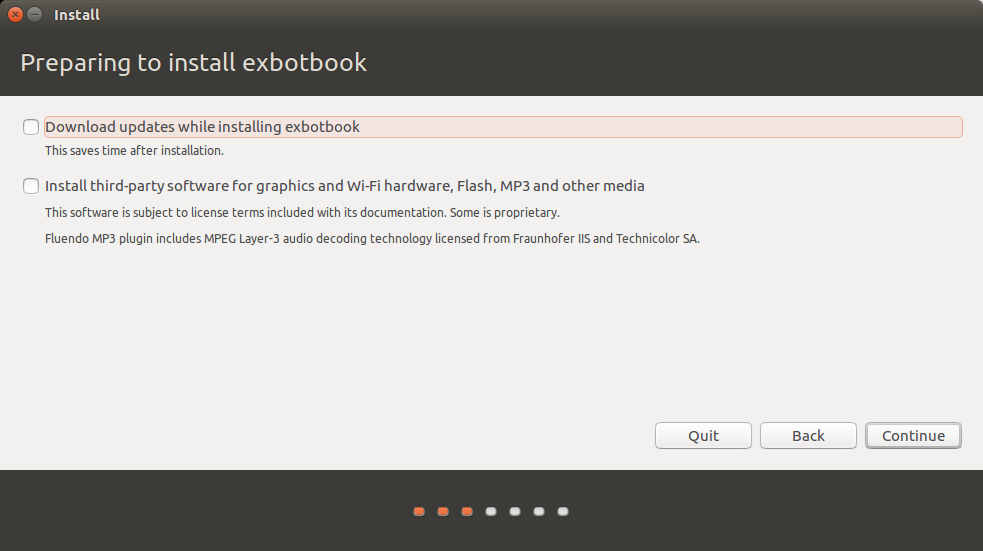
请注意下面警告,谨慎操作:

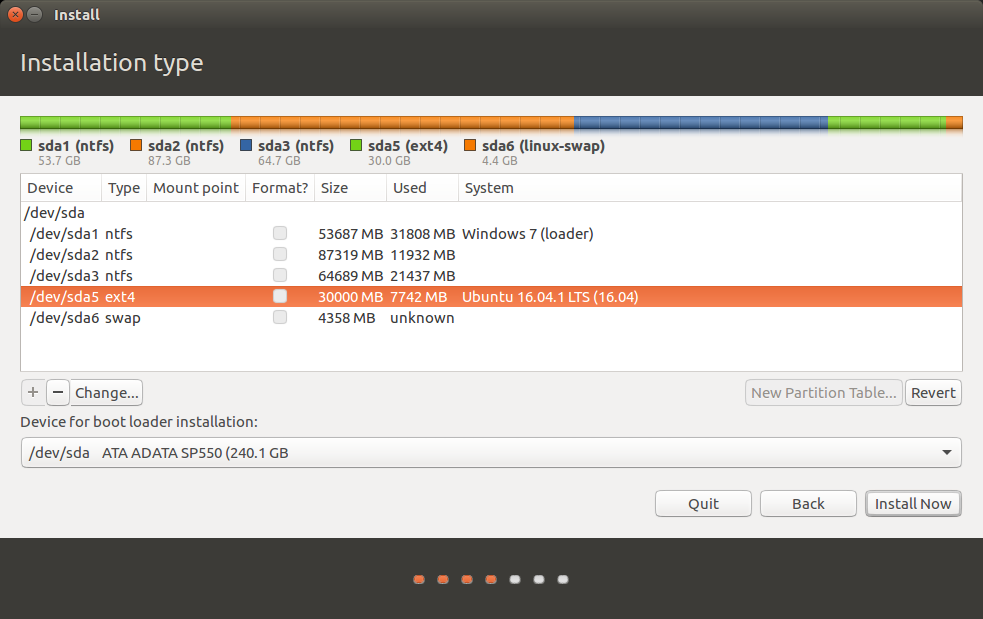
安装步骤和Ubuntu一模一样,安装完成后,如果windows系统不见了,UEFI/Legacy情况不同,可查找解决。
Legacy比较简单,进入系统后在终端输入 sudo update-grub 或 sudo update-grub2 即可。
-End-
镜像制作稍后补充,可选用Pinguy Builder(已预装),Remastersys,respin。在sourceforge或github上可以下载。