手机应用软件:Robotics Engineering - Apps on Google Play
This Robotics Engineering App provides the basic know-how on the foundations of robotics: modelling, planning and control. The App takes the user through a step-by step design process in this rapidly advancing specialty area of robot design.This App provides the professional engineer and student with important and detailed methods and examples ...
----
GitHub+awesome
在github中搜索awesome+关键词,可以看到非常多有用的资源。
编程基础部分:
Matlab:https://github.com/uhub/awesome-matlab
Python:https://github.com/vinta/awesome-python
C++:https://github.com/fffaraz/awesome-cpp
如,机器人学:https://github.com/kiloreux/awesome-robotics
This is a list of various books, courses and other resources for robotics. It's an attempt to gather useful material in one place for everybody who wants to learn more about the field.
CoursesGazebo Robot Simulator
ROS The Robot Operating System (ROS) is a flexible framework for writing robot software. It is a collection of tools, libraries, and conventions that aim to simplify the task of creating complex and robust robot behavior across a wide variety of robotic platforms.
ROS2 ROS2 is a new version of ROS with radical design changes and improvement over older ROS version.
RobWork RobWork is a collection of C++ libraries for simulation and control of robot systems. RobWork is used for research and education as well as for practical robot applications.
MRPT Mobile Robot Programming Toolkit provides developers with portable and well-tested applications and libraries covering data structures and algorithms employed in common robotics research areas.
Robotics Library The Robotics Library (RL) is a self-contained C++ library for robot kinematics, motion planning and control. It covers mathematics, kinematics and dynamics, hardware abstraction, motion planning, collision detection, and visualization.
Simbad 2D/3D simulator in Java and Jython.
Morse General purpose indoor/outdoor 3D simulator.
Carmen CARMEN is an open-source collection of software for mobile robot control. CARMEN is modular software designed to provide basic navigation primitives including: base and sensor control, logging, obstacle avoidance, localization, path planning, and mapping.
Peekabot Peekabot is a real-time, networked 3D visualization tool for robotics, written in C++. Its purpose is to simplify the visualization needs faced by a roboticist daily.
YARP Yet Another Robot Platform.
V-REP Robot simulator, 3D, source available, Lua scripting, APIs for C/C++, Python, Java, Matlab, URBI, 2 physics engines, full kinematic solver.
Webots Webots is a development environment used to model, program and simulate mobile robots.
Drake A planning, control and analysis toolbox for nonlinear dynamical systems.
Neurorobotics Platform (NRP) An Internet-accessible simulation system that allows the simulation of robots controlled by spiking neural networks.
The Player Project Free Software tools for robot and sensor applications
Open AI's Roboschool Open-source software for robot simulation, integrated with OpenAI Gym.
ViSP Open-source visual servoing platform library, is able to compute control laws that can be applied to robotic systems.
ROS Behavior Trees Open-source library to create robot's behaviors in form of Behavior Trees running in ROS (Robot Operating System).
PapersConferencesAwesome links, software libraries, papers, and other intersting links that are useful for robots.
Relevant Awesome ListsImage Segmentation
Dataset Collection
Basic vision and trasformation libraries
Thread-safe queue libraries
Loop detection
Graph Optimization
Map library
DatasetDataset for benchmark/test/experiment/evalutation
ToolsProjectsRGB (Monocular):
[1] Georg Klein and David Murray, "Parallel Tracking and Mapping for Small AR Workspaces", Proc. ISMAR 2007 [2] Georg Klein and David Murray, "Improving the Agility of Keyframe-based SLAM", Proc. ECCV 2008
Direct Sparse Odometry, J. Engel, V. Koltun, D. Cremers, In arXiv:1607.02565, 2016 A Photometrically Calibrated Benchmark For Monocular Visual Odometry, J. Engel, V. Usenko, D. Cremers, In arXiv:1607.02555, 2016
LSD-SLAM: Large-Scale Direct Monocular SLAM, J. Engel, T. Schöps, D. Cremers, ECCV '14 Semi-Dense Visual Odometry for a Monocular Camera, J. Engel, J. Sturm, D. Cremers, ICCV '13
[1] Raúl Mur-Artal, J. M. M. Montiel and Juan D. Tardós. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE > Transactions on Robotics, vol. 31, no. 5, pp. 1147-1163, 2015. (2015 IEEE Transactions on Robotics Best Paper Award). PDF. [2] Dorian Gálvez-López and Juan D. Tardós. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE > Transactions on Robotics, vol. 28, no. 5, pp. 1188-1197, 2012. PDF.
D. Nister, “An efficient solution to the five-point relative pose problem,” Pattern Analysis and Machine Intelligence, IEEE Transactions on, vol. 26, no. 6, pp. 756–770, 2004.
Christian Forster, Matia Pizzoli, Davide Scaramuzza, "SVO: Fast Semi-direct Monocular Visual Odometry," IEEE International Conference on Robotics and Automation, 2014.
RGB and Depth (Called RGBD):
Real-Time Visual Odometry from Dense RGB-D Images, F. Steinbucker, J. Strum, D. Cremers, ICCV, 2011
[1]Dense Visual SLAM for RGB-D Cameras (C. Kerl, J. Sturm, D. Cremers), In Proc. of the Int. Conf. on Intelligent Robot Systems (IROS), 2013. [2]Robust Odometry Estimation for RGB-D Cameras (C. Kerl, J. Sturm, D. Cremers), In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2013 [3]Real-Time Visual Odometry from Dense RGB-D Images (F. Steinbruecker, J. Sturm, D. Cremers), In Workshop on Live Dense Reconstruction with Moving Cameras at the Intl. Conf. on Computer Vision (ICCV), 2011.
Online Global Loop Closure Detection for Large-Scale Multi-Session Graph-Based SLAM, 2014 Appearance-Based Loop Closure Detection for Online Large-Scale and Long-Term Operation, 2013
[1] Raúl Mur-Artal, J. M. M. Montiel and Juan D. Tardós. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE > Transactions on Robotics, vol. 31, no. 5, pp. 1147-1163, 2015. (2015 IEEE Transactions on Robotics Best Paper Award). [2] Dorian Gálvez-López and Juan D. Tardós. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE Transactions on Robotics, vol. 28, no. 5, pp. 1188-1197, 2012.
Kahler, O. and Prisacariu, V.~A. and Ren, C.~Y. and Sun, X. and Torr, P.~H.~S and Murray, D.~W. Very High Frame Rate Volumetric Integration of Depth Images on Mobile Device. IEEE Transactions on Visualization and Computer Graphics (Proceedings International Symposium on Mixed and Augmented Reality 2015
Real-time Large Scale Dense RGB-D SLAM with Volumetric Fusion, T. Whelan, M. Kaess, H. Johannsson, M.F. Fallon, J. J. Leonard and J.B. McDonald, IJRR '14
[1] ElasticFusion: Real-Time Dense SLAM and Light Source Estimation, T. Whelan, R. F. Salas-Moreno, B. Glocker, A. J. Davison and S. Leutenegger, IJRR '16 [2] ElasticFusion: Dense SLAM Without A Pose Graph, T. Whelan, S. Leutenegger, R. F. Salas-Moreno, B. Glocker and A. J. Davison, RSS '15
Martin Rünz and Lourdes Agapito. Co-Fusion: Real-time Segmentation, Tracking and Fusion of Multiple Objects. 2017 IEEE International Conference on Robotics and Automation (ICRA)
RGBD and LIDAR:
----
awesome-deep-vision-web-demoA curated list of awesome deep vision web demo
ContributingPlease feel free to pull requests to add papers.
Vision Demo ListHand-written Digit Recognition----
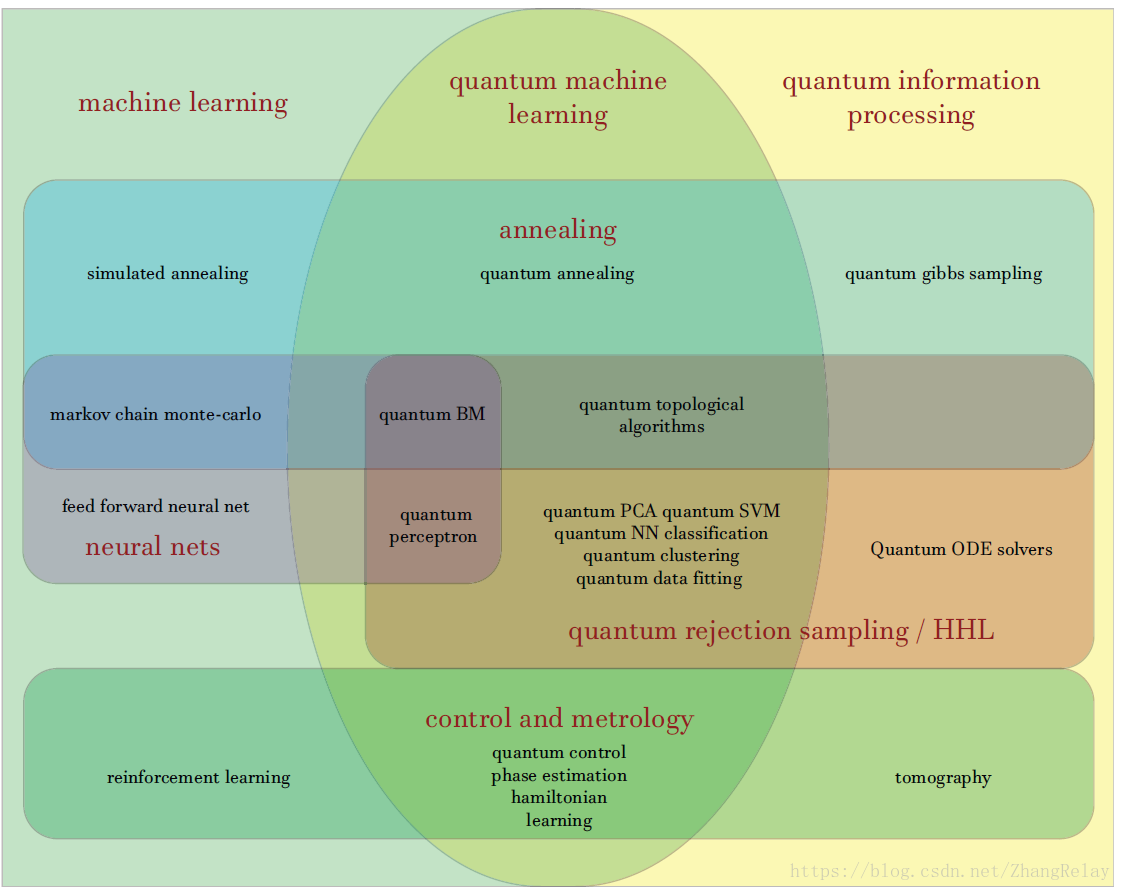
量子机器学习-量子机器人
The computing field must have a change from classical to quantum.
计算领域必须从经典变为量子。
https://github.com/krishnakumars ... um-machine-learning
----
Fall 2017 - Vision Algorithms for Mobile RoboticsUZH-BMINF020 / ETH-151-0632-00L
The course is open to all the students of the University of Zurich and ETH. Students should register through their own institutions.
Goal of the Course
For a robot to be autonomous, it has to perceive and understand the world around it. This course introduces you to the key computer vision algorithms used in mobile robotics, such as feature extraction, multiple view geometry, dense reconstruction, tracking, image retrieval, event-based vision, and visual-inertial odometry (the algorithms behind Google Tango, Apple ARKit, Google ARCore, Microsoft Hololens, Magic Leap and the Mars rovers). Basics knowledge of algebra, geomertry, and matrix calculus are required.
Time and location
Lectures: every Thursday from 10:15 to 12:00 in ETH LFW C5, Universitätstrasse 2, 8092 Zurich.
Exercises: Thursdays, roughly every two weeks, from 13:15 to 15:00 in ETH HG E 1.1, Rämistrasse 101, 8092 Zurich.
Please check out the course agenda below for the exact schedule.
Course Program, Slides, and Add-on Material
Official course program (please notice that this is a tentative schedule and that the effective content of the lecture can change from week to week.
Date | Lecture and Exercise Title | Slides and add-on material |
| 21.09.2017 | Lecture 01 - Introduction to Computer Vision and Visual Odometry | Slides (last update 21.09.2017) Visual odometry tutorial Part I Visual odometry tutorial Part II SLAM survey paper |
| 28.09.2017 | Lecture 02 - Image Formation 1: perspective projection and camera models | Slides (last update 27.09.2017) |
| 05.10.2017 | Lecture 03 - Image Formation 2: camera calibration algorithms Exercise 01 - Augmented reality wireframe cube | Slides (last update 04.10.2017) Additional reading on P3P and PnP problems Exercise 01 (last update 04.10.2017) Solutions (last update 12.10.2017) Introduction to Matlab |
| 12.10.2017 | Lecture 04 - Filtering & Edge detection Exercise 02 - PnP problem | Slides (last update 12.10.2017) Exercise 02 (last update 12.10.2017) Solutions (last update 16.10.2017) |
| 19.10.2017 | Lecture 05 - Point Feature Detectors, Part 1 Exercise 03 - Harris detector + descriptor + matching | Slides (last update 19.10.2017) Exercise 03 (last update 17.10.2017) Solutions (last update 24.10.2017) |
| 26.10.2017 | Lecture 06 - Point Feature Detectors, Part 2 | Slides (last update 26.10.2017) Additional reading on feature detection |
| 02.11.2017 | Lecture 07 - Multiple-view geometry 1 Exercise 04 - Stereo vision: rectification, epipolar matching, disparity, triangulation | Slides (last update 01.11.2017) Additional reading on stereo image rectification Exercise 04(last update 31.10.2017) Solutions (last update 31.10.2017) |
| 09.11.2017 | Lecture 08 - Multiple-view geometry 2 Exercise 05 - Two-view Geometry | Slides (last update 9.11.2017) Additional reading on 2-view geometry Exercise 05 (last update 8.11.2017) Solutions (last update 14.11.2017) |
| 16.11.2017 | Lecture 09 - Multiple-view geometry 3 Exercise 06 - P3P algorithm and RANSAC | Slides (last update 22.11.2017) Additional reading on open-source VO algorithms Exercise 06 (last update 16.11.2017) Solutions (last update 20.11.2017) |
| 23.11.2017 | Lecture 10 - Dense 3D Reconstruction Exercise session: Intermediate VO Integration | Slides (last update 29.11.2017) Additional reading on dense 3D reconstruction Find the VO project downloads below |
| 30.11.2017 | Lecture 11 - Optical Flow and Tracking (Lucas-Kanade) Exercise 07 - Lucas-Kanade tracker | Slides (last update 29.11.2017) Additional reading on Lucas-Kanade Exercise 07 (last update 30.11.2017) Solutions (last update 06.12.2017) |
| 07.12.2017 | Lecture 12 - Place recognition Exercise session: Deep Learning Tutorial | Slides (last update 07.12.2017) Additional reading on Bag-of-Words-based place recognition Optional exercise on place recognition(last update 06.12.2017) Deep Learning Slides(last update 07.12.2017) |
| 14.12.2017 | Lecture 13 - Visual inertial fusion Exercise 08 - Bundle Adjustment | Slides (last update 14.12.2017) Advanced Slides for intrerested reader Additional reading on visual-inertial fusion Exercise 08 (last update 13.12.2017) Solutions (last update 17.12.2017) |
| 21.12.2017 | Lecture 14 - Event based vision + Scaramuzza's lab visit with live demos Exercise session: final VO integration | Slides (last update 19.12.2017) Additional reading on event-based vision |
Oral Exam Questions (last udpate 21.12.2017)
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. This documentcontains a "non exhaustive" list of possible application questions and an "exhaustive" list of all the topics that you should learn about the course, which will be subject of discussion in the theoretical part.
Grading and optional Mini Project (last udpate 22.11.2017)
The final grade is based on the oral exam (30 minutes, exam date for UZH: Jan. 18; exam date for ETH students will be between January 22 and February 9 2018, dates communicated by ETH). Mini projects are optional and up to the students. Depending on the result of the mini project (see Project Specification in the table below), the student will be rewarded with a grade increase of up to 0.5 on the final grade. However, notice that the mini project can be quite time consuming. Mini project specification and files can be found in the table below. The deadline for the project is Sunday, 07.01.2018, 23:59:59, and it can be submitted via e-mail to the assistants (detailed instructions in specification).
| Description | Link(size) |
| Project Specification | vo_project_statement.pdf (600 kB, last updated 22.11.2017) |
| FAQ | Frequently Asked Questions |
| Parking garage dataset (easy) | parking.zip (208.3 MB) |
| KITTI 00 dataset (hard) | kitti00.zip (2.3 GB) |
| Malaga 07 dataset (hard) | malaga-urban-dataset-extract-07.zip (2.4 GB) |
| Matlab script to load datasets | main.m (2.6 kB) |
Recommended Textbooks
(All available in the NEBIS catalogue)
The course is currently open to all the students of the University of Zurich and ETH (Bachelor's and Master's). Lectures take place every Monday (from 16.02.2014 to 30.05.2014) from 14:15 to 16:00 in the ETH main building (HG) in room E 1.2. Exercise take place almost every second Tuesday from 10:15 to 12:00 in the ETH main building in room G1.
The course is also given as an MOOC (Massive Open Online Course) under edX.
Course Program
Recommended Textbook
R. Siegwart, I.R. Nourbakhsh, and D. Scaramuzza
Introduction to autonomous mobile robots 2nd Edition (hardback)
A Bradford Book, The MIT Press, ISBN: 978-0-262-01535-6, February, 2011
The book can be bought during the first lecture or on Amazon.
Archived slides, videos, and lecture recordings
Since 2007, Prof. Davide Scaramuzza has been teaching this course at ETH Zurich and since 2012 the course has been shared also with University of Zurich. The lectures are based on Prof. Scaramuzza's book Autonomous Mobile Robots, MIT Press. Recordings of previous lectures (until 2012) can be watched or downloaded, only by ETH students, here.
You can download all the lecture slides and videos of past lectures (updated in 2010) from the following links:
----
| 欢迎光临 黑马程序员技术交流社区 (http://bbs.itheima.com/) | 黑马程序员IT技术论坛 X3.2 |